平行軸の定理とは
任意の点0を通る 軸のまわりの慣性モーメントの計算
軸のまわりの慣性モーメントの計算
重心を通る1つの軸があるとし、それを![]() として、
として、![]() 軸の周りの剛体の慣性モーメントを
軸の周りの剛体の慣性モーメントを とします。
とします。
この軸に平行で の距離を隔てた軸まわりの慣性モーメントを考えてみましょう。
の距離を隔てた軸まわりの慣性モーメントを考えてみましょう。
の式を積分の形にすれば、
 点の
点の の周りのモーメントは、
の周りのモーメントは、
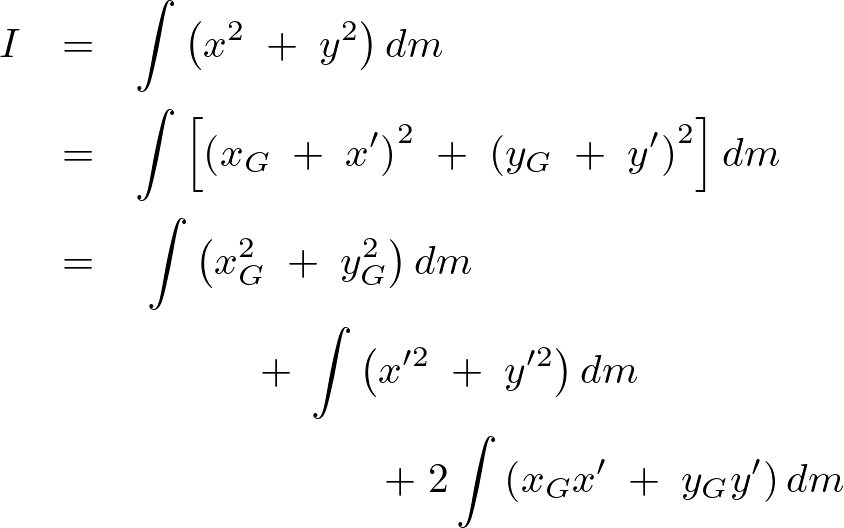
ここで を質量中心の座標とします。
を質量中心の座標とします。
積分の第2項は質量中心を通り、![]() 軸に平行な軸周りの慣性モーメントであり、これを
軸に平行な軸周りの慣性モーメントであり、これを とします。
とします。
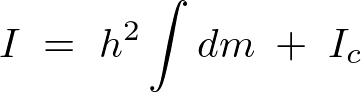
質量中心より回転の中心までの距離をとすると、

さらに第3項の および
および は質量中心の定義においてゼロ。
は質量中心の定義においてゼロ。
以上の結果より、慣性モーメントとして、
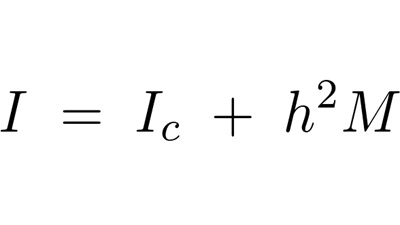
すなわち、

が導かれることになります。
この定理は様々な形でよく利用されるものであり、はじめのうちは何かとややこしく感じますが使い慣れてくると非常に役に立つ便利なものになります。
平行軸定理と慣性モーメント
重心を通る1つの軸をz軸としてこの周りの剛体の慣性モーメントをI0とします。 この軸に平行でhの距離を隔てた慣性モーメントを考えます。
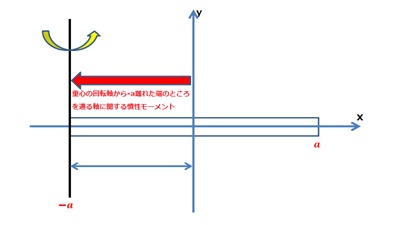
棒の慣性モーメント
重心の位置を0とする-aからaまでの棒の距離の長さを2a、棒の左へ-aだけ移動した端を通る軸に関する慣性モーメントを求めます。

Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
-
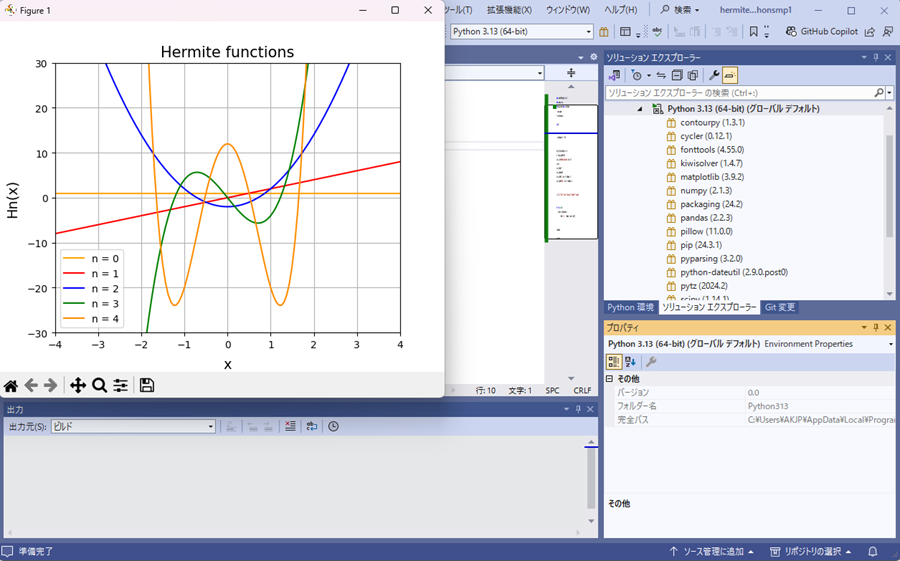
微分方程式いろいろTOPページLaTeXコード
カテゴリー : 微分方程式いろいろLaTeXコードサテライトサイト微分方程式いろいろコンテンツトップページに使われたコードになります。コンパイル時のエラー等の修…
-
-
Cisco Packet Tracer
カテゴリー : Cisco Packet TracerPacket Tracerとは、Ciscoが提供するCisco製のルータやスイッチなどをローカル端末上でコンフ…
-
-
-
-
-
-
-
コリオリ長距離弾道軌道計算②
コリオリ弾道軌道計算①で求められた次の3つの連立微分方程式、

この連立微分方程式に関して具体的に解いていきます。
まず の式を計算していきます。
の式を計算していきます。
微分演算子法を使用した計算を行うために次のように置きます。