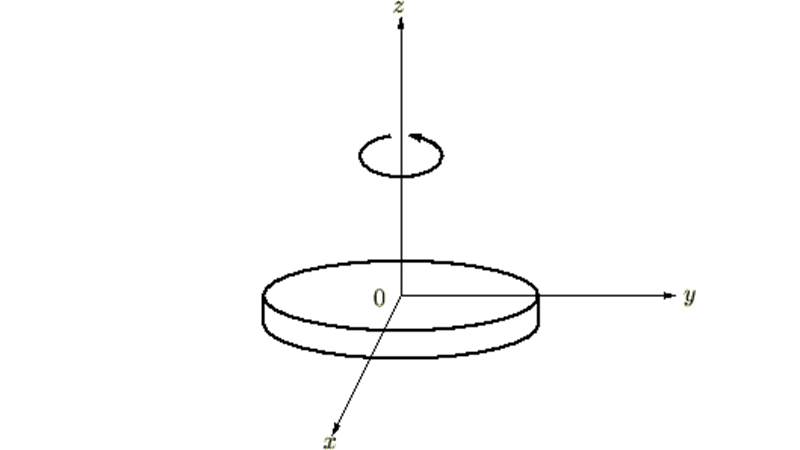
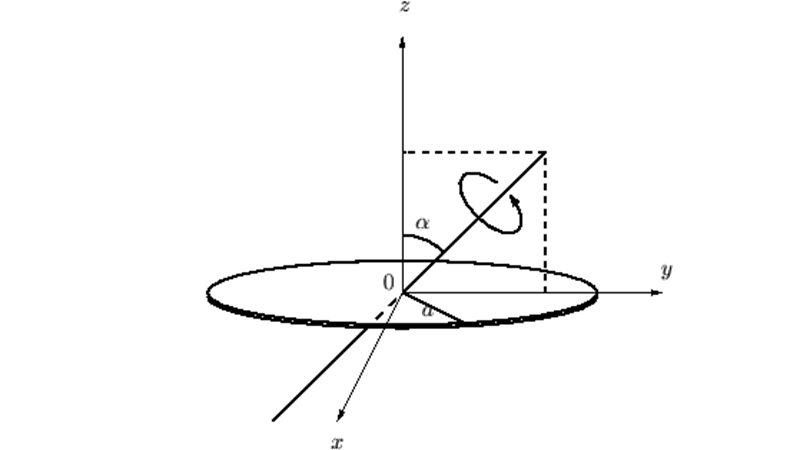
円輪の慣性モーメントの導出過程
円輪の中心を通る対称軸に関する慣性モーメントの計算
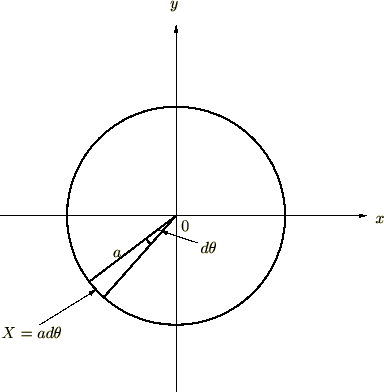
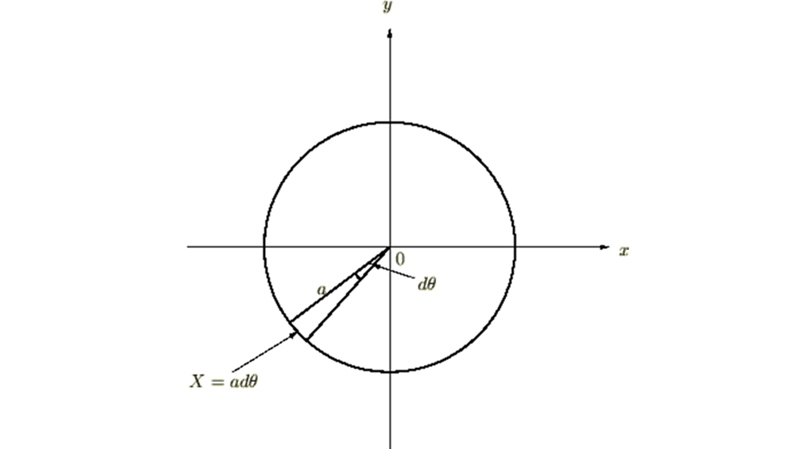
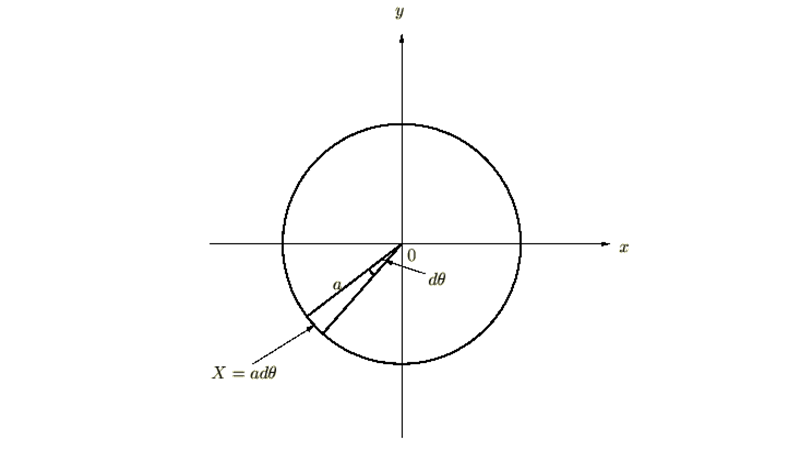
極座標系を取り 軸周りの慣性モーメントをそれぞれ
軸周りの慣性モーメントをそれぞれ とし、質量は
とし、質量は![]() 、半径は
、半径は![]() 、円周は
、円周は![]() とします。
とします。
なので円輪の線密度は、

角度変数 の微小部分長は
の微小部分長は 。
。
これにより微小部分の質量は、

そしての取る範囲は になります。
になります。
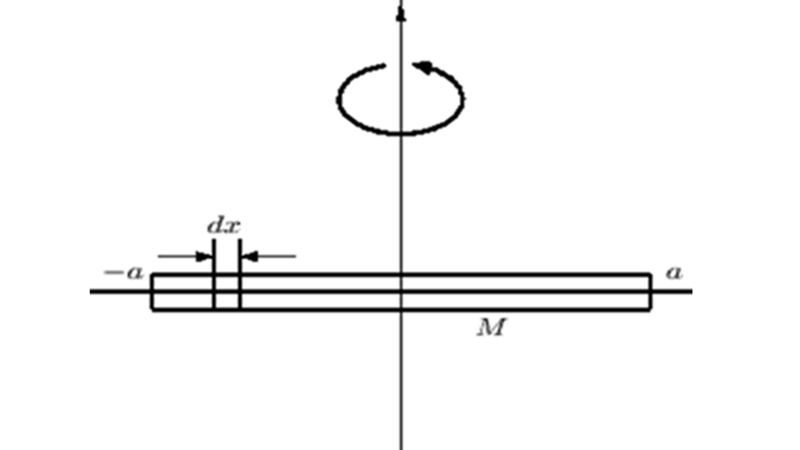
 軸まわりの慣性モーメント
軸まわりの慣性モーメント
![]() 軸からの微小部分までの距離は
軸からの微小部分までの距離は 。
。
これらにより は、
は、

全体にわたってたし上げます。

よって円輪の中心を通る![]() 軸周りの慣性モーメントは以下のようになります。
軸周りの慣性モーメントは以下のようになります。

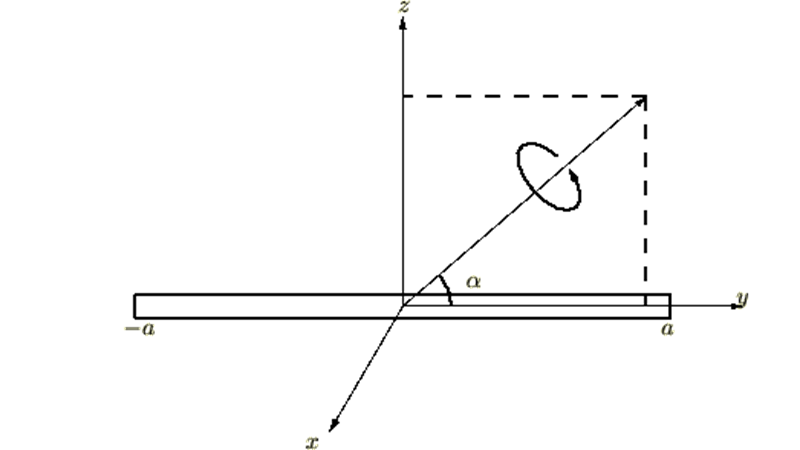
 軸まわりの慣性モーメント
軸まわりの慣性モーメント
 軸からの微小部分までの距離は
軸からの微小部分までの距離は 。
。
は、

全体にわたってたしあげます。

よって円輪の中心を通る軸周りの慣性モーメントは以下のようになります。

 軸周りの慣性モーメント
軸周りの慣性モーメント
![]() 軸からの微小部分までの距離は
軸からの微小部分までの距離は 。
。
 は、
は、

全体にわたってたしあげます。

となるので円輪の![]() 軸周りの慣性モーメントは以下のようになります。
軸周りの慣性モーメントは以下のようになります。

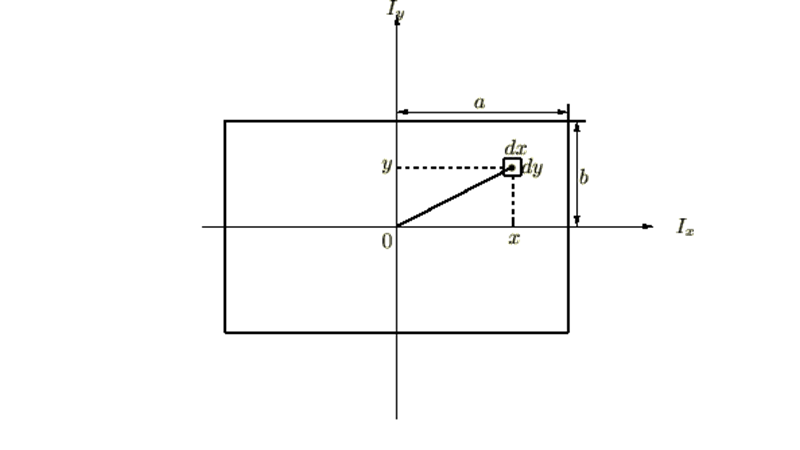
ちなみにこの円輪に対しても長方形板のときと同じように、次のような関係式が成り立っています。

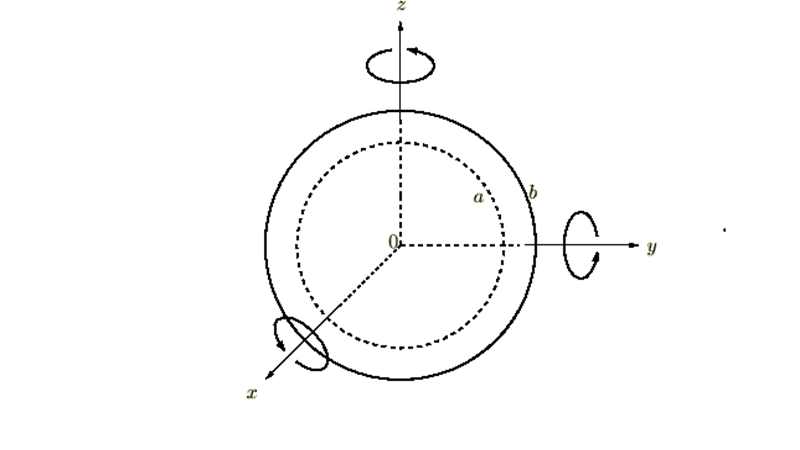
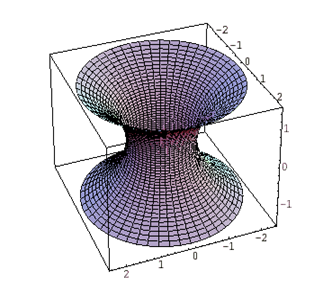
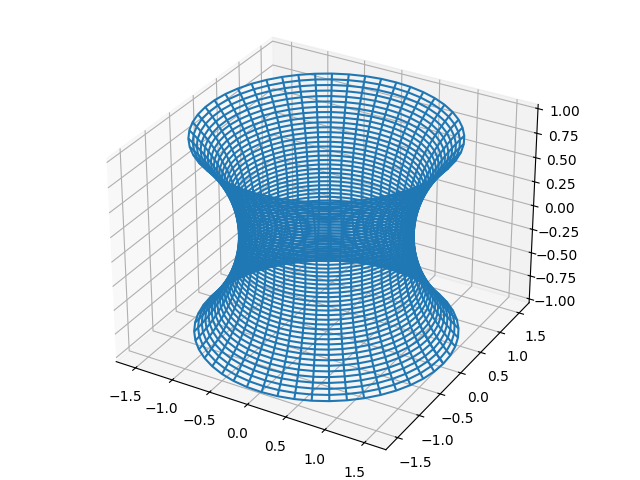
球殻の慣性モーメント
一様密度で質量M、外径b、内半径aの球殻の中心を通る慣性モーメントの厚さがある場合と厚さを無視できる場合の慣性モーメントを考察していきます。
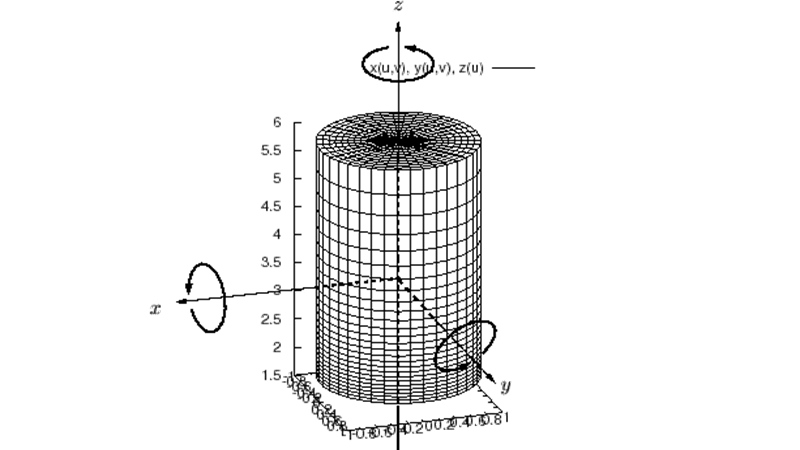
円柱の慣性モーメント
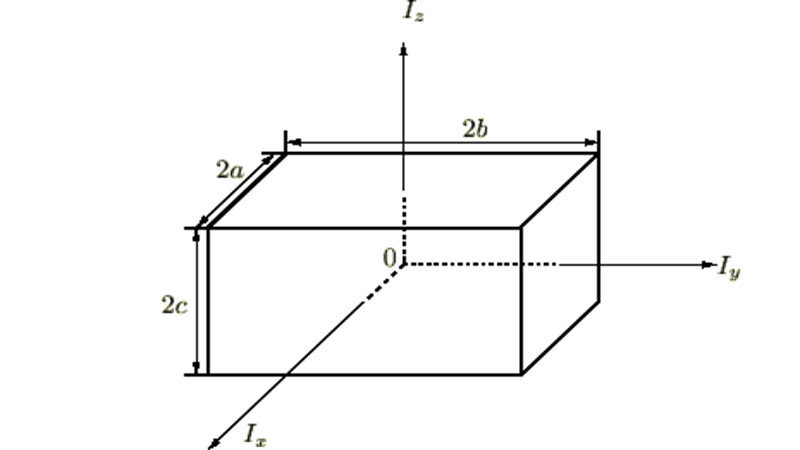
円柱の重心を通る対称軸に関する慣性モーメントの計算 ━ 半径がa、高さがlで質量がMとする円柱のxyz軸におけるそれぞれの慣性モーメント。
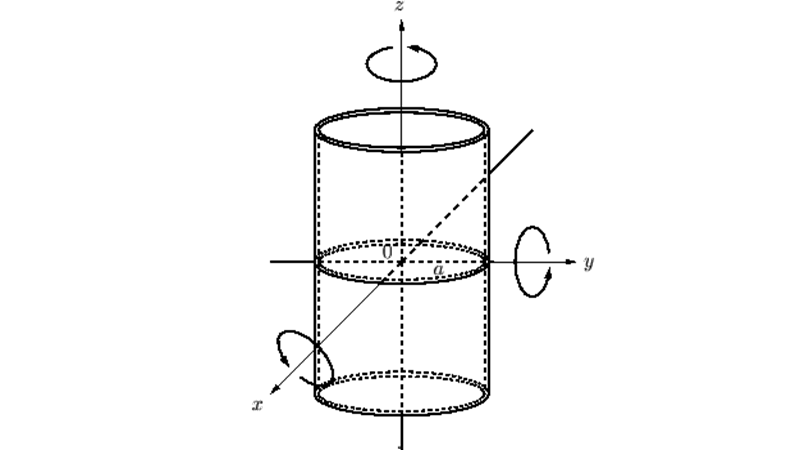
中空円筒の慣性モーメント
中空円筒の重心を通る軸に関する慣性モーメント ━ 一様密度で質量がM、半径がa、長さをlとし、円筒の外側の厚さは無視できるものとします。
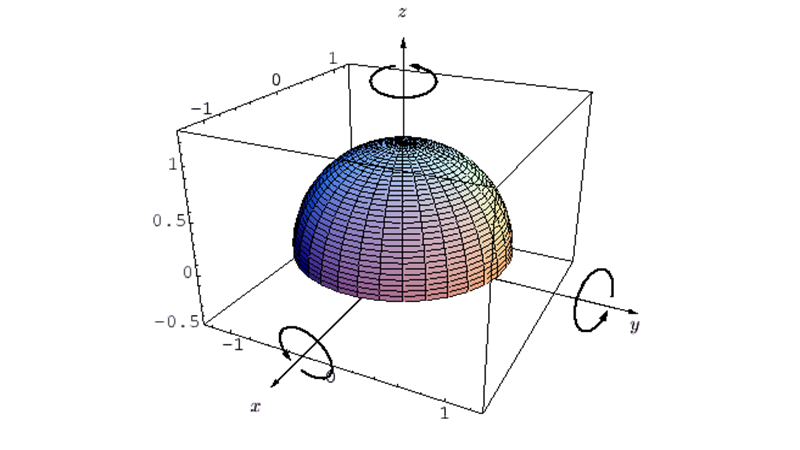
半球体の慣性モーメント
半球体の重心を通る軸に関する慣性モーメントの導出 ━ 質量がM、半径がaの半球体の重心周りに関する慣性モーメントの計算過程。
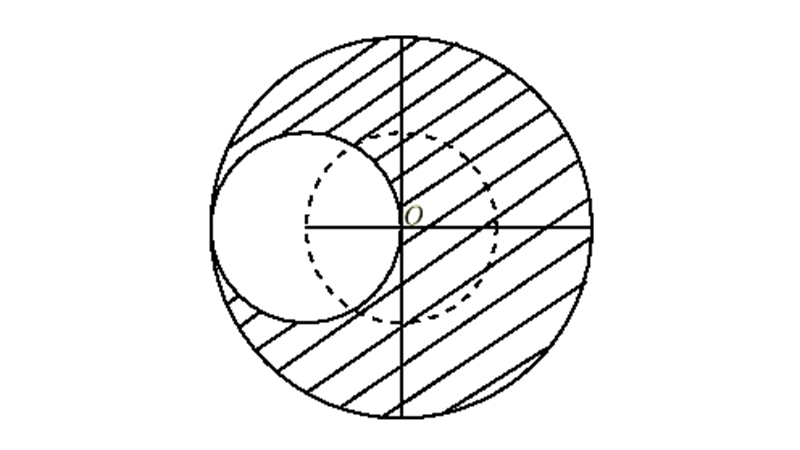
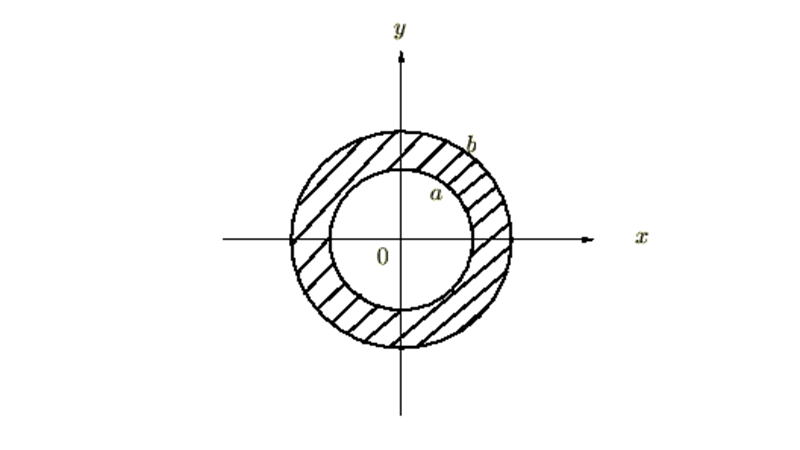
くり抜き円盤の慣性モーメント
くり抜かれた円盤の慣性モーメントに関して、平行軸の定理を利用して目的とする円盤の慣性モーメントの導出に関して詳しく解説していきます。
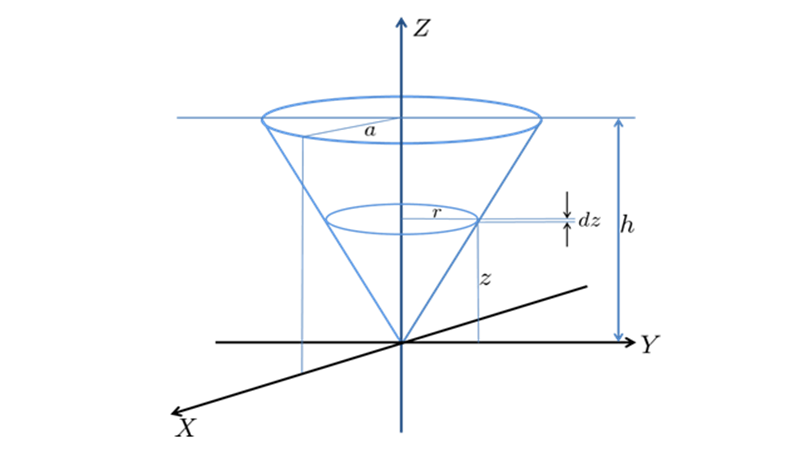
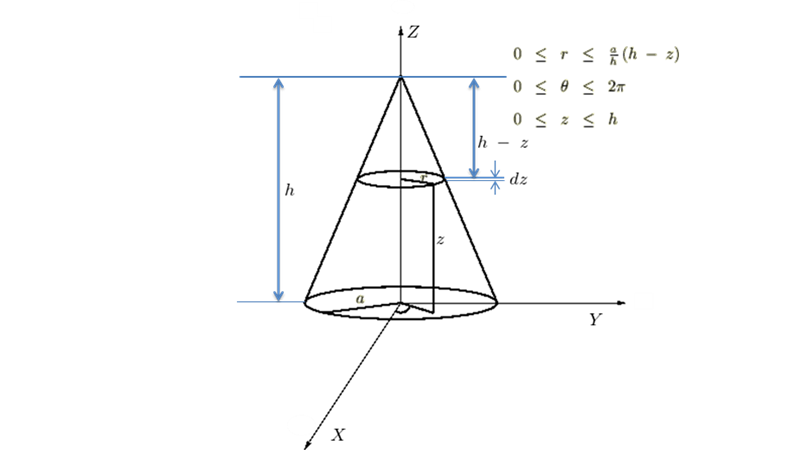
円錐の慣性モーメント-2
円錐の頂点周り、円錐底面に平行で中心点を通る軸周りの慣性モーメント、さらには円錐の重心回りの慣性モーメントについて考察していきます。
-
微分方程式いろいろTOPページLaTeXコード
カテゴリー : 微分方程式いろいろLaTeXコードサテライトサイト微分方程式いろいろコンテンツトップページに使われたコードになります。コンパイル時のエラー等の修…
-
-
Cisco Packet Tracer
カテゴリー : Cisco Packet TracerPacket Tracerとは、Ciscoが提供するCisco製のルータやスイッチなどをローカル端末上でコンフ…
-
-
-
-
-
-
-
コリオリ長距離弾道軌道計算②
コリオリ弾道軌道計算①で求められた次の3つの連立微分方程式、

この連立微分方程式に関して具体的に解いていきます。
まず の式を計算していきます。
の式を計算していきます。
微分演算子法を使用した計算を行うために次のように置きます。