dv計算法-答え
dv計算法問題の答え
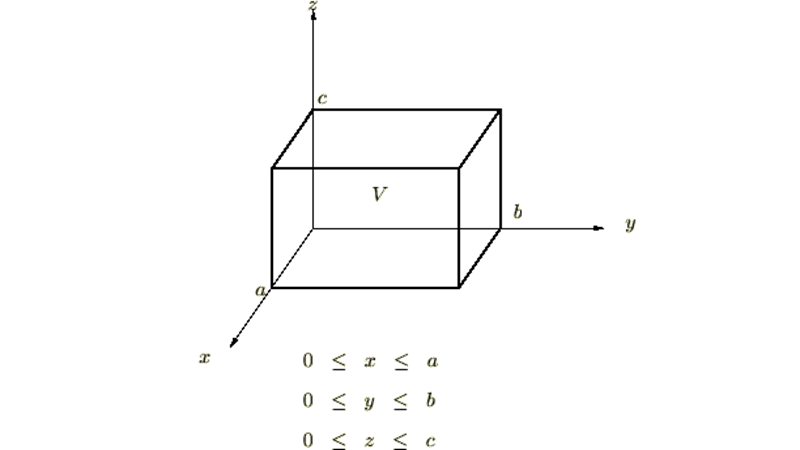
問題①の答え
立方体の体積を求める要領と同じになります。



重積分形式であえて表現すると以上のような形で計算を実施していくという意味になります。
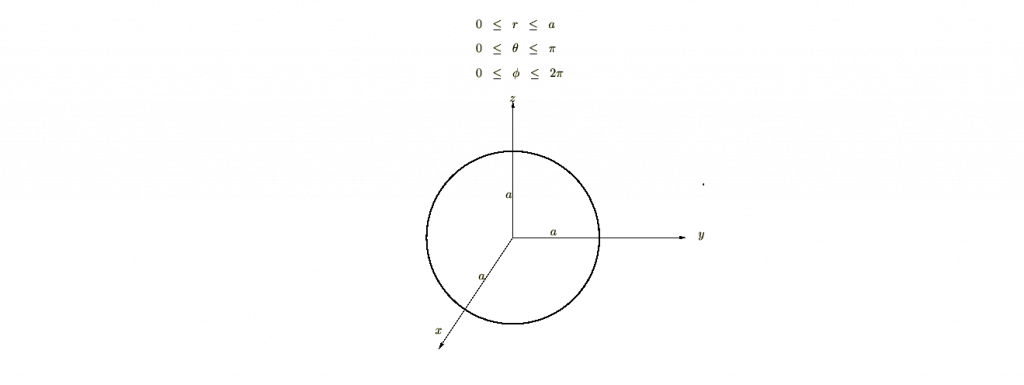
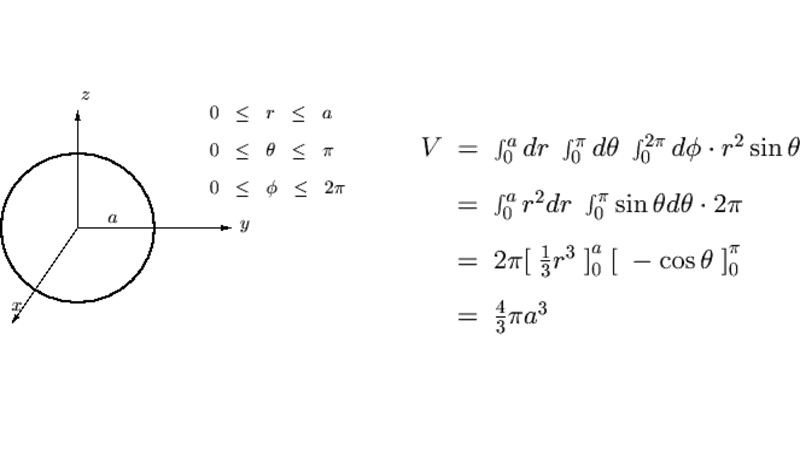
問題②の答え
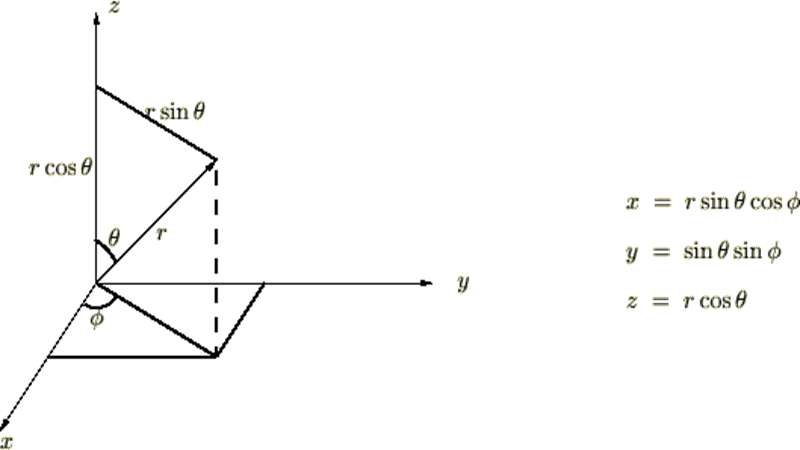
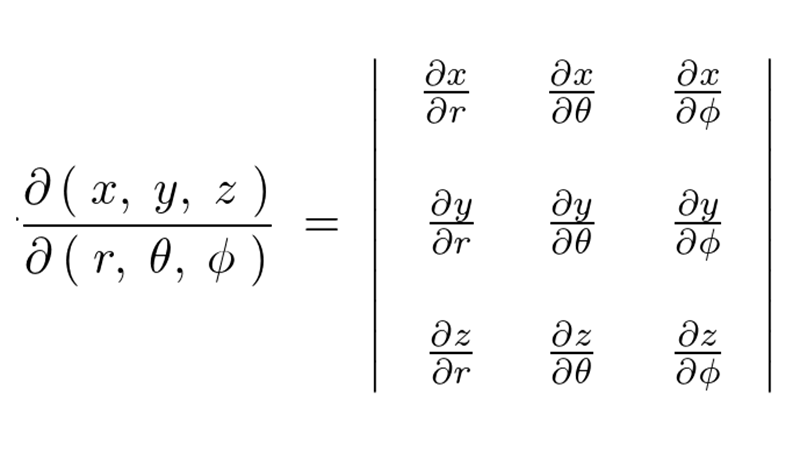
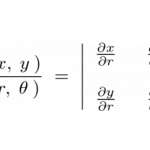
極座標におけるヤコビアンを使用します。


 と
と の範囲についてですが、これはまず
の範囲についてですが、これはまず![]() を
を から
から![]() まで伸ばし、さらにに関しては、例えば
まで伸ばし、さらにに関しては、例えば![]() 軸からを中心にして180度動かし、そしてに関しては360度回転させるといった形になります。
軸からを中心にして180度動かし、そしてに関しては360度回転させるといった形になります。
なのではその範囲が となります。
となります。
次のように計算していきます。


これにより以下のように求まります。

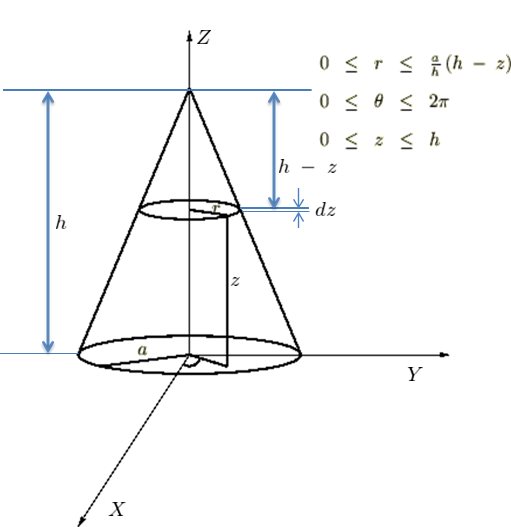
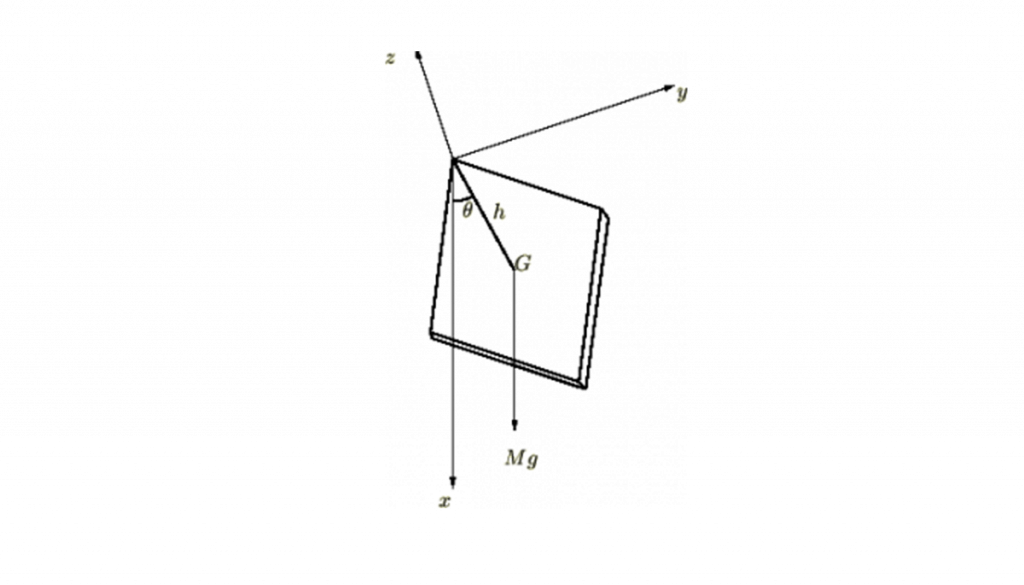
問題③の答え
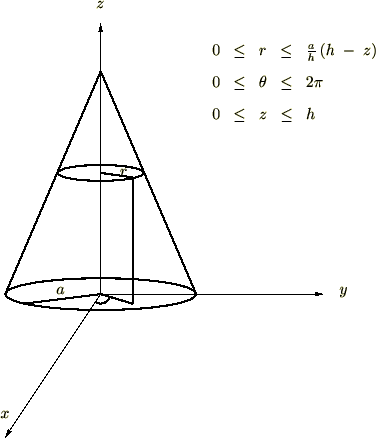
この場合、円柱座標におけるヤコビアンを使用します。

![]() の範囲についてですが、これは次のような相似関係を利用して導き出しています。
の範囲についてですが、これは次のような相似関係を利用して導き出しています。

これを![]() の積分範囲として代入して以下のようにして計算していきます。
の積分範囲として代入して以下のようにして計算していきます。

よって円錐の体積は次のように求まります。
問題④の答え

比例定数を![]() と置きます。
と置きます。
そうしたとき は、
は、

平面極座標においてのヤコビアンは![]() なので微小面積要素は、
なので微小面積要素は、


計算していきます。

以下のように求まります。

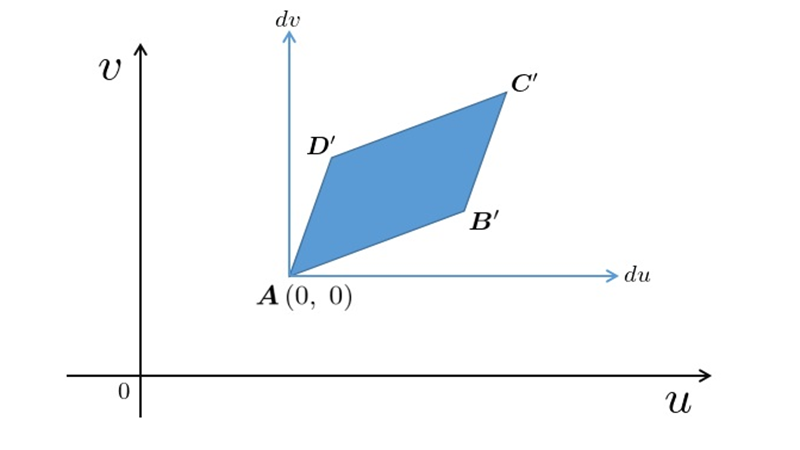
変数変換とヤコビアン
別の座標系へ対応させた場合その微小面積要素に対しどの程度のスケール変換量をスカラ倍させれば同値になるかを求めるものにヤコビアンがあります。
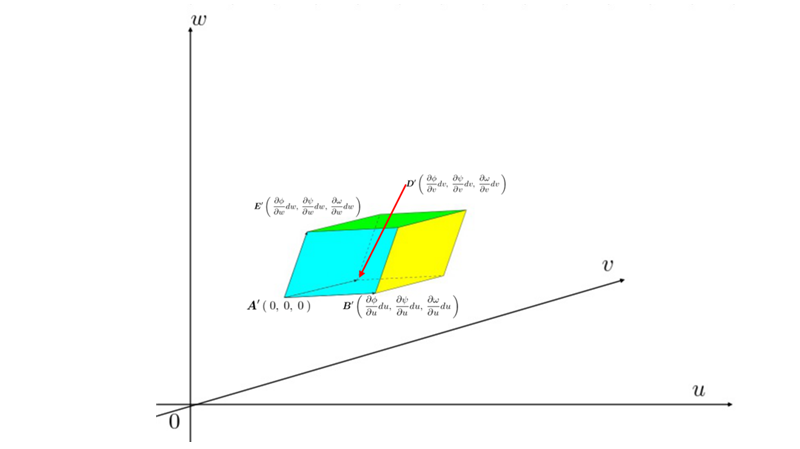
多次元量ヤコビアン
2次元スケール変換を今度は3次元に拡張した場合を考えます。それは3次元以上においてどのような意味を持つのかを考察していきます。
微小面積要素の計算
ヤコビアンを使った微小面積要素の考察をします。
dvの計算法
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
微小体積要素の計算
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
dvの計算方法-答え
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.

Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
-
-

diff-eq.comスケールアップマイグレーション2
カテゴリー : diff-eq.comスケールアップマイグレーション2前回からの続きになります。この度のマイグレーションは運用を始めてから2か月弱ほどたっていないという異例の速さに…
-
diff-eq.comスケールアップマイグレーション1
カテゴリー : diff-eq.comスケールアップマイグレーション1微分方程式いろいろを本格稼働してからたった2か月弱しかたっていませんが運用していてわかったのですがサーバレスポ…
-
-
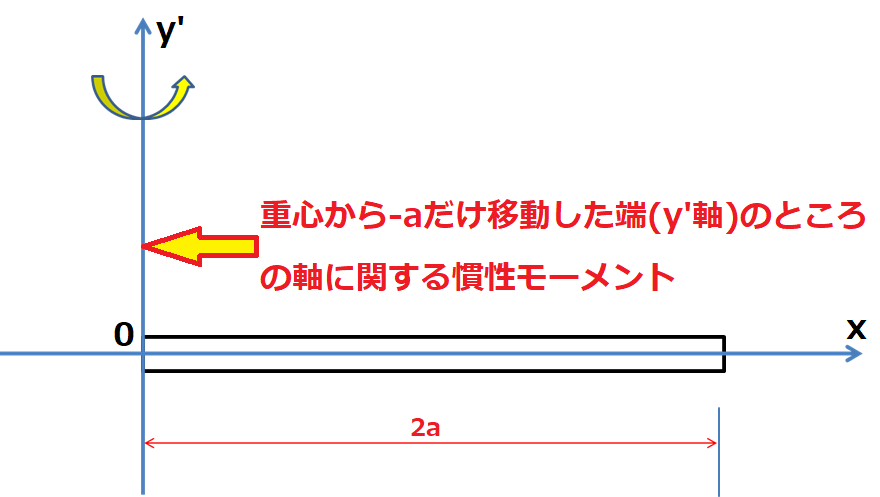
平行軸の定理と棒の慣性モーメント
カテゴリー : 平行軸定理を使った棒の慣性モーメント重心の位置を0とする-aからaまでの棒の距離の長さを2a、棒の左へ-aだけ移動した端を通る軸に関する慣性モーメ…
-
-
-
-
-
コリオリの力とは
フランスの科学者で軍属でもあったガスパール・ギュスターブ・コリオリ
初歩的な力学の分野において慣性系に関する話の中にコリオリの力というものがあります。
この“コリオリ”とは人の名前であり地球が回転することによっておこる見かけの運動力を、回転座標上で移動したときの移動方向と垂直な方向に受ける慣性力の一種を数式で表現したものになります。
一般的にこのコリオリという人物は科学者という記述が多いのですが実は軍人でもあったことはあまり知られていないようです。
北半球において大砲を撃ったとき、その弾道が標的よりもわずかに右にずれることを数式によって説明した人物ということで自衛隊でも多少知られた存在らしく、話の小ネタとして話題になることもありました(おそらく重迫撃砲(ヘヴィモータ)などではコリオリの力による弾道補正が必要になるためだと思います)。
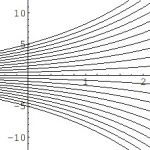
回転座標で運動する物体
円運動の角度を![]() 、周囲に沿った距離を
、周囲に沿った距離を 、ボールの速度を
、ボールの速度を![]() 、慣性力を
、慣性力を![]() とおくと、
とおくと、
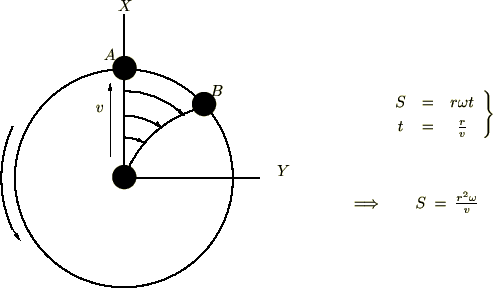
上の図は、矢印の通りに回転させた円盤を真上からみたものであり、中心から外側へ投げた球があたかも右のほうへずれたように見えるその様子を表したものです。中心部分にいる人物は図の の方向へ投げたつもりが
の方向へ投げたつもりが のほうへまるで曲がって投げたように見えてしまいます。
のほうへまるで曲がって投げたように見えてしまいます。
 はは動径方向に垂直な方向に働く慣性力とし、一定加速度での移動距離は
はは動径方向に垂直な方向に働く慣性力とし、一定加速度での移動距離は の形で表せるので、
の形で表せるので、


この力をコリオリの力と呼び、回転座標系で運動する物体に加わる慣性力のことを言います。
この力を実際に数式を使って具体的に表現してみましょう。
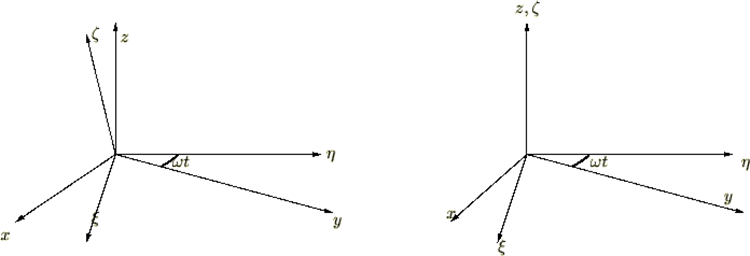
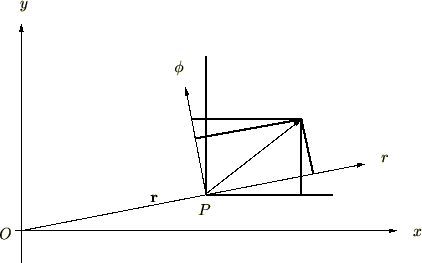
左の座標系が3次元での回転、右の座標系の図が2次元での回転を表したものになります。
これより回転座標系において時間変化した角度を![]() とすれば以下のように表せます。
とすれば以下のように表せます。

または、

これを時間で微分します。


上記式を再度時間微分します。


力 と
と の間の関係は次式で表されます。
の間の関係は次式で表されます。

さらに 系(慣性系)では次のような運動方程式、
系(慣性系)では次のような運動方程式、
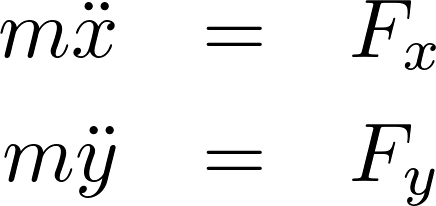
が成り立つので上の式の結果を用いて を表せば、
を表せば、


これらを代入し 系の座標について整理すれば、
系の座標について整理すれば、
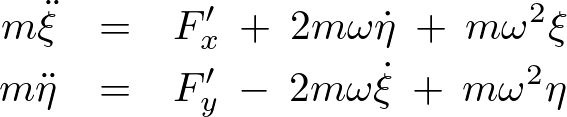
 は回転系座標から見た加速度運動で、運動の原因となる力として
は回転系座標から見た加速度運動で、運動の原因となる力として のほかに2つの力が加わった形であり、右辺第2項、第3項は見かけの力(慣性力)を示しています。
のほかに2つの力が加わった形であり、右辺第2項、第3項は見かけの力(慣性力)を示しています。
右辺のそれぞれの意味は、
| 右辺第2項(コリオリの成分) |  |
| 右辺第3項(遠心力の成分) |  |
を示しています。
回転座標系をまとめてみると次のようになります。
慣性系に対して運動する座標系
| 1. | 等速度運動する座標系は慣性系となる(ガリレイ変換) |
| 2. | 加速度運動する座標系は非慣性系(見かけの力=慣性力)を考える
|
| 3. | 回転運動をする座標系は2種類の見かけの力を考える
|
これらを踏まえて今度は長距離射撃におけるコリオリ弾道軌道計算を考えていきましょう。
次回に続きます。