波動方程式
波動方程式とは
2階の偏微分方程式における境界値問題
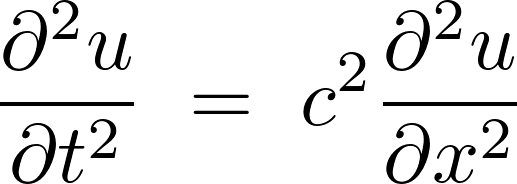
2階の偏微分方程式における境界値問題として、ここでは波動方程式を取り上げます。
波動方程式とは、波動の変位に関して時間と座標に関する変数を独立変数としてとらえることのできる定数係数型偏微分方程式(双曲線偏微分方程式)であり、この方程式における境界値に関する問題を、半区間におけるフーリエ積分表示などを使って解いていくことを考えていきます。
境界条件
境界条件としてまず次のように置きます。

さらに弦の初期条件とその速度微分を次のように与えます。

ここで上記の![]() を、距離と時間の2つの変数を含む次のようなもととします。
を、距離と時間の2つの変数を含む次のようなもととします。

波動方程式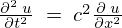 に対してそれぞれ当てはめれば、
に対してそれぞれ当てはめれば、
左辺

右辺

これらにより、

上記式に対して変数分離を行うと、

それぞれの変数に分離できたのでまずは のほうから考えていきます。
のほうから考えていきます。

次のような条件を考えます。

といった条件を満たすものを求めます。
 の解で
の解で の式を満たすものは次の3種類が考えられます。
の式を満たすものは次の3種類が考えられます。
 のとき
のとき
 という条件での一般解を求めます。
という条件での一般解を求めます。
以下のように積分を実行していきます。
さらに積分を実行していきます。

よって のときの一般解は以下のように求まります。
のときの一般解は以下のように求まります。

条件より、

さらに の条件、
の条件、

も考慮すれば は
は となり意味がありません。
となり意味がありません。
 のとき
のとき
一般解は、

となるので条件より、


となります。
この場合も再び はとなるので
はとなるので と同じように解として意味がありません。
と同じように解として意味がありません。
 のとき
のとき
最後の を実際にやってみると、
を実際にやってみると、
よって以下のように求まることになります。
このためこの式の特性方程式は以下のような複素数解になることになります。
実数部は、虚数部は なので特性方程式は、
なので特性方程式は、

条件より、


 なので、
なので、

ここで であるためには
であるためには という条件が必要になります。
という条件が必要になります。
 の場合は
の場合は の条件を満たす
の条件を満たす の解として、
の解として、

さらに に関して、
に関して、

意味のある解を代入すれば、


先ほどの結果 を代入すると、
を代入すると、

この方程式の解を求めるために同様にして特性方程式を導くと、
より、
実数部がで虚数部が なので、
なので、

これらの結果をそれぞれ およびとして
およびとして に代入すれば、
に代入すれば、

ここで と置けば、
と置けば、

上記式中の![]() は
は![]() を除く整数であり異なる
を除く整数であり異なる![]() に対してもまた同様に
に対してもまた同様に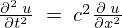 の解として成立します。
の解として成立します。
または線形微分方程式であり独立な解どうしであったとしてもそれらを重ね合わせたものもまた同様に線形微分方程式の解となります。
線形の重ね合わせの原理を考えれば、
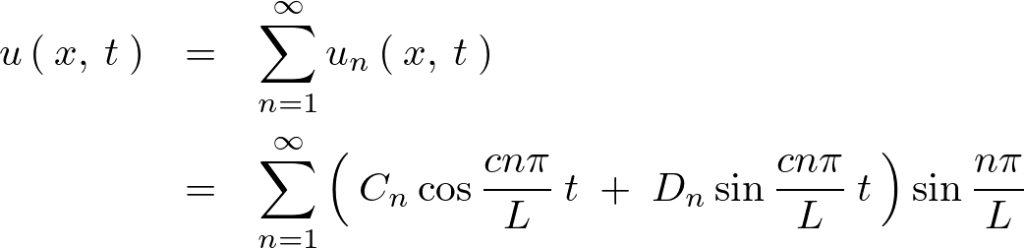

初期変位 のときに、
のときに、
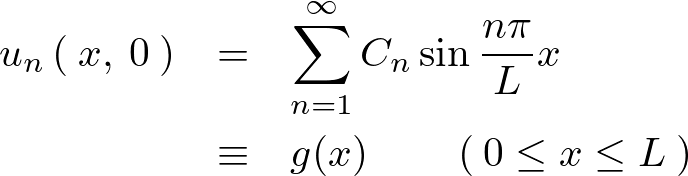
ここで式を見やすくするために次のように置きます。
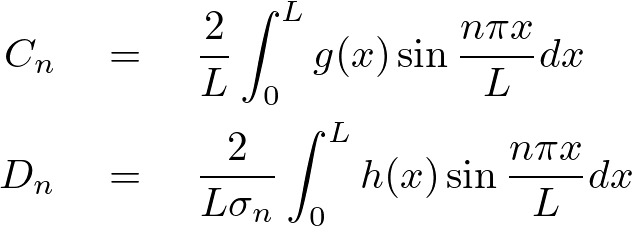
フーリエ級数の半区間の展開において奇関数での拡張を思い出せば、


これを使えば 、および
、および は以下のように求まります。
は以下のように求まります。
上記を代入すれば以下のような一次元波動方程式の解が求まります。

波動方程式
波動方程式とは、波動の変位に関して時間と座標に関する変数を独立変数としてとらえることのできる定数係数型偏微分方程式になります。
熱伝導方程式
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.

Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
コリオリ長距離弾道軌道計算②
コリオリ弾道軌道計算①で求められた次の3つの連立微分方程式、

この連立微分方程式に関して具体的に解いていきます。
まず の式を計算していきます。
の式を計算していきます。
微分演算子法を使用した計算を行うために次のように置きます。
