1階常微分方程式
1階微分方程式
変数分離形
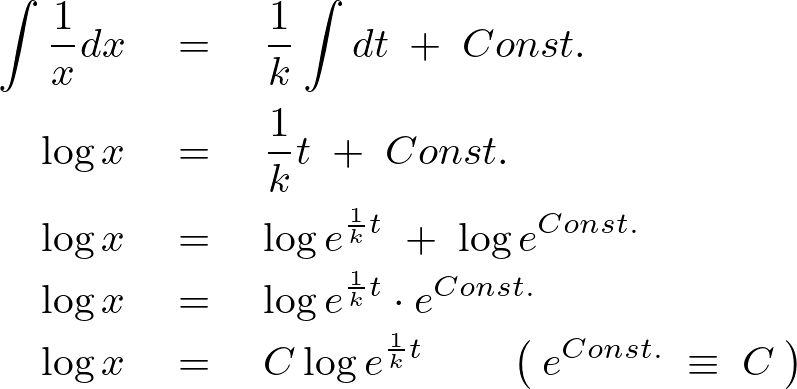
次の形の1階の微分方程式、
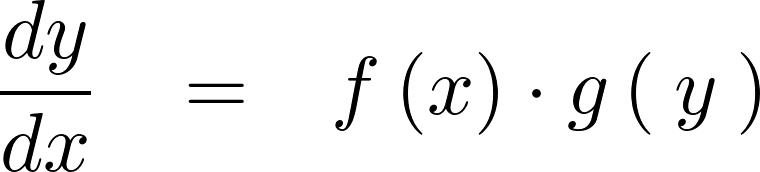
解き方としては、まず変数が2つあるので両辺にそれぞれを“分ける”ということをします。
上記式に関しては、左右の同じ変数を持つもの同士で分けるようにしてそれぞれを移動させると、
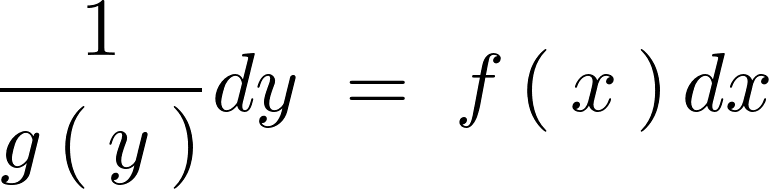
これを両辺にわたって積分します。

![]() というのは積分整数のことになります。特にことわりがなければ今後
というのは積分整数のことになります。特にことわりがなければ今後 と表します。
と表します。
例題1
以下のような微分方程式を考えます。

まず変数分離という作業をします。

それぞれを両辺にわたって積分していきます。
よって以下のように求まります。

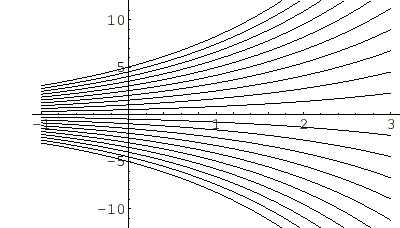
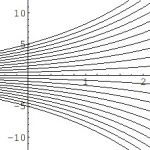
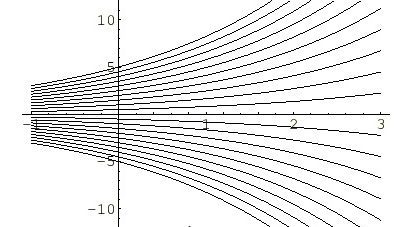
上図においては![]() の時の
の時の![]() をグラフ化したものになります。ラインは上記の積分計算によって出てきた積分定数の
をグラフ化したものになります。ラインは上記の積分計算によって出てきた積分定数の![]() の値を
の値を![]() から
から![]() の範囲で
の範囲で![]() 刻みでプロットしているためになります。
刻みでプロットしているためになります。
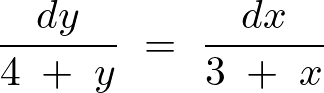
例題2

まずは変数分離を行います。
次に両辺を積分します。
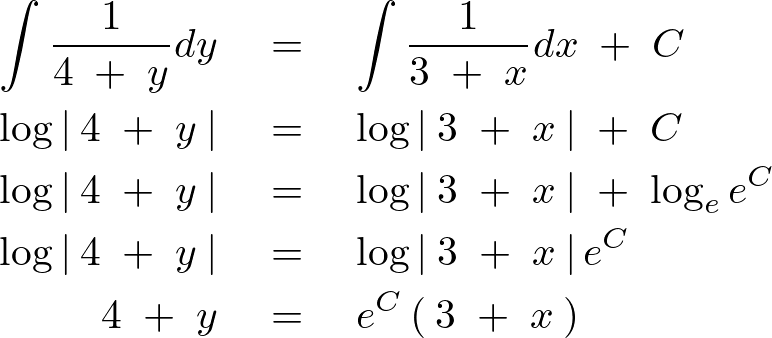
よって一般解は以下のようになります。

1階常微分方程式
作用素が1階のものを1階微分方程式と呼び、変数が2つある場合それぞれを同じ変数同士で分けて、作用素を変化させて計算していきます。
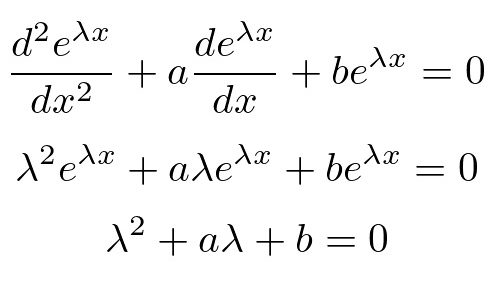
2階同次微分方程式
微分作用素が2階微分入っている微分方程式を考え、この時作用素の入っていない右辺が0の場合を2階同次微分方程式と呼びます。
Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.

Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.

 の式を計算していきます。
の式を計算していきます。