ヘヴィサイド演算子法
ヘヴィサイド演算子とは
微分演算子の表記
ある関数を、例えば![]() で微分する場合は左側から
で微分する場合は左側から のように演算子を“作用”させ、そしてそれらに働きかけて関数そのものを変化させます。
のように演算子を“作用”させ、そしてそれらに働きかけて関数そのものを変化させます。
こういったものを作用素といい、この場合は時間![]() ですが、それ以外にも
ですが、それ以外にも![]() や
や (ナブラ)、さらにはダランベルジャンなどもその作用素(オペレーター)と呼ぶことができます。
(ナブラ)、さらにはダランベルジャンなどもその作用素(オペレーター)と呼ぶことができます。
演算子法とはその作用素自体を記号の などとし、そしてそれを通常の“代数”(例えば分数)のように扱うちょっと変わった計算法になります。
などとし、そしてそれを通常の“代数”(例えば分数)のように扱うちょっと変わった計算法になります。
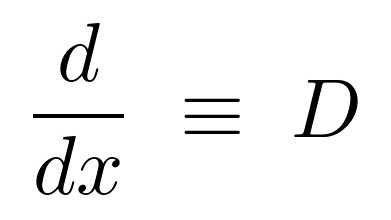
今![]() の関数を
の関数を とした場合、この時のヘヴィサイド微分演算子の表記の仕方は以下のようになります。
とした場合、この時のヘヴィサイド微分演算子の表記の仕方は以下のようになります。
なので例えば、![]() に対して上記の演算子を作用させれば、
に対して上記の演算子を作用させれば、
通常は例えば![]() の関数をとした場合、
の関数をとした場合、 といった表現を意味し、微分方程式における以下のような表記、
といった表現を意味し、微分方程式における以下のような表記、
は以下のような表現をすることになります。

逆演算子
通常はであるので、これの逆数 は積分を意味していると考えるようにします。
は積分を意味していると考えるようにします。
例えば であるとするならば、
であるとするならば、
であり、
といったことを意味しています。
今ここで次のような関数 を考え、それに対して微分演算子を作用させます。
を考え、それに対して微分演算子を作用させます。
積の微分により、

またさらに次のような関数、
に対しても上記の場合と同じようにを作用させて計算すると、
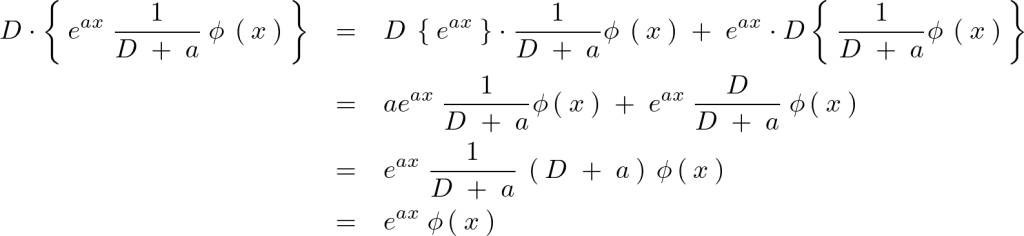

この計算結果を逆にとらえれば、

となり、微分演算子の逆数をに作用させると右辺のように変化するのだと考えることができます。
このカテゴリでは微分演算子を使った微分方程式、特に連立微分方程式の解法について詳しく解説しています。以下のコンテンツよりお入りください。

Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
Title Text
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
コリオリ長距離弾道軌道計算②
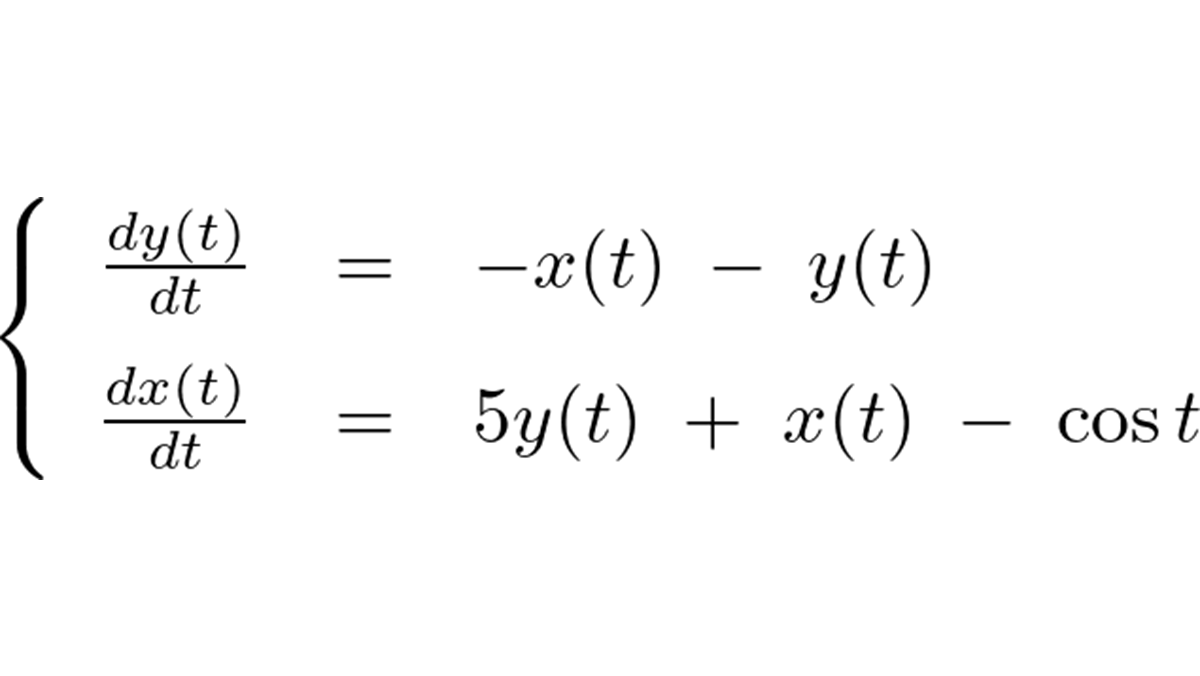
コリオリ弾道軌道計算①で求められた次の3つの連立微分方程式、

この連立微分方程式に関して具体的に解いていきます。
まず の式を計算していきます。
の式を計算していきます。
微分演算子法を使用した計算を行うために次のように置きます。
