連成振動の解②-3重バネの振動
連成振動の解②
3重バネの振動
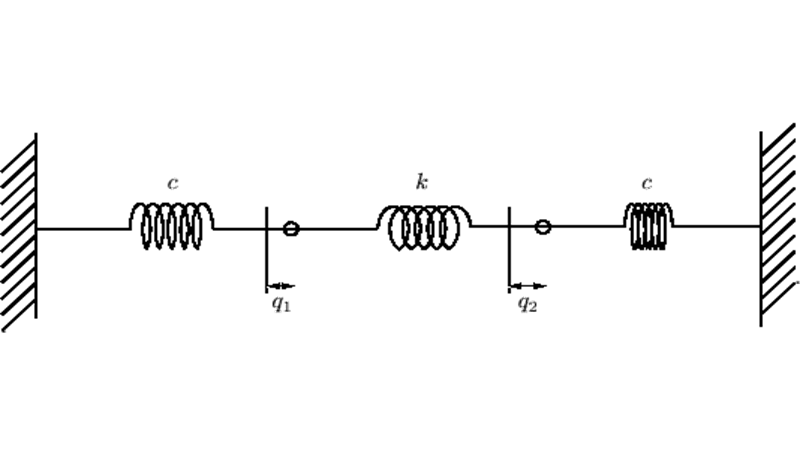
以下のような図において、壁側についているばねのばね定数を![]() 、真ん中のバネのバネ定数を
、真ん中のバネのバネ定数を![]() とし、そのバネの境に重さ
とし、そのバネの境に重さ![]() のおもりをつけた場合の連成振動の解をラグランジアンを使って考察していきます。
のおもりをつけた場合の連成振動の解をラグランジアンを使って考察していきます。
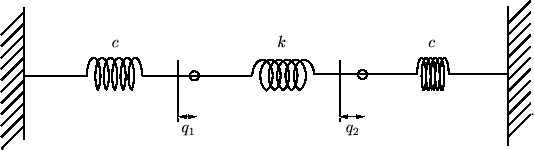
振動の方向は水平方向のみとし、両質点の変位を 、
、 とすれば左端のバネはだけ伸び、中央のバネは
とすれば左端のバネはだけ伸び、中央のバネは だけ伸び、右のバネはだけ縮みます。
だけ伸び、右のバネはだけ縮みます。
こうしたときラグランジアンは、

まず最初により、
より、

またに関して、
より同様にして、


ここで上記方程式における、の解を次のようにおきます。
この両式に対して時間微分を施します。

この時間微分による結果を代入していきます。
まずより、

に関しても同様にして、

まとめれば以下のように求まります。

上記式においては、 、
、 が同時に
が同時に になると運動しないことになります。
になると運動しないことになります。
なので、 、および
、および のような運動が可能であるには、が同時に“”にならない条件として、 先ほどのセクション内において示した次のような式、
のような運動が可能であるには、が同時に“”にならない条件として、 先ほどのセクション内において示した次のような式、

を考える必要があります。
これを実際に計算すると、


この式において とおけば次に示すような
とおけば次に示すような に対する2次方程式が出来上がります。
に対する2次方程式が出来上がります。

これを次のように計算していきます。

これよりをもとに戻せば以下の解が求まります。
ここで上記の求まった解を区別するために以下のようにおきます。
![]() を代入すると、
を代入すると、
また、![]() を代入すれば、
を代入すれば、

したがって、

の4つとも解になるのでそれぞれを代入します。

これが一般解になります。
、およびの与える解![]() は距離を変えずに左右に振動する運動。
は距離を変えずに左右に振動する運動。
また一方で は逆方向の運動と考えられます。
は逆方向の運動と考えられます。
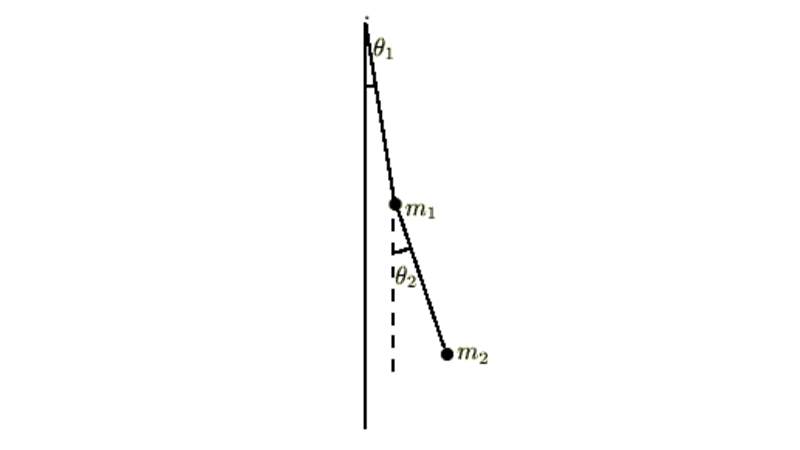
2重振り子の振動①
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
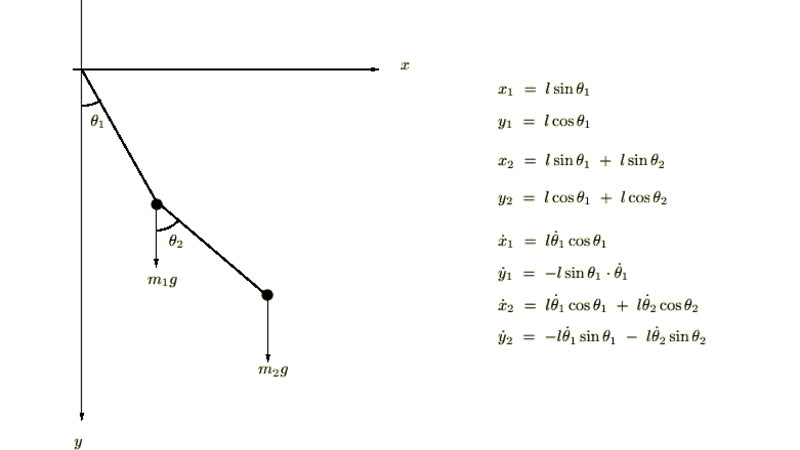
2重振り子の振動②
Lorem ipsum dolor sit amet, consectetur adipiscing elit, sed do eiusmod tempor incididunt ut labore et dolore magna aliqua.
コリオリ長距離弾道軌道計算②
コリオリ弾道軌道計算①で求められた次の3つの連立微分方程式、

この連立微分方程式に関して具体的に解いていきます。
まず の式を計算していきます。
の式を計算していきます。
微分演算子法を使用した計算を行うために次のように置きます。
